
SMART Dogs herding sheep on a farm, looks like flock of bird pattern

A dog herding sheep in a sheepdog trial
Sheepdogs, bred to control large groups of sheep in open fields, have demonstrated their skills in competitions dating back to the 1870s.
In these contests, a handler directs a trained dog with whistle signals to guide a small group of sheep across a field and sometimes split the flock cleanly into two groups. But sheep do not always cooperate.
Researchers at the Georgia Institute of Technology studied how handler–dog teams manage these unpredictable flocks in sheepdog trials and found principles that extend beyond livestock herding.
In a study published in Science Advances as the cover feature, the researchers applied those insights to computer simulations showing how similar strategies could improve the control of robot swarms, autonomous vehicles, AI agents, and other networked systems where many machines must coordinate their actions despite uncertain conditions.
Group Movement Dynamics
“Birds, bugs, fish, sheep, and many other organisms move in groups because it benefits individuals, including protection from predators,” said Saad Bhamla, an associate professor in Georgia Tech’s School of Chemical and Biomolecular Engineering. “The puzzle is that the ‘group’ is not a single organism. It is built from many individuals, each making local, imperfect decisions.”
When a predator threatens a herd of sheep, individuals near the edge often move toward the center to reduce their own risk, Bhamla explained. “This is ‘selfish herd’ behavior,” he said. “Shepherds exploit that instinct using trained dogs.”
From examining hours of contest footage, the researchers found that controlling small groups of sheep can be harder than managing large ones. A larger group, with more sheep protected in the center, may behave more coherently than a small group as the animals constantly shift between two instincts: “follow the group” and “flee the dog.”
“That switching behavior makes the group unpredictable,” said Tuhin Chakrabortty, a former postdoctoral researcher in the Bhamla Lab who co-led the study.
Looking closely at how dogs and their handlers guide small groups, the researchers found that unpredictability in the flock’s behavior does not always make control harder. “Under the right conditions, that ‘noisy’ behavior might actually be a benefit,” Bhamla said.
Successful Sheep Herding
Sheepdog handlers categorize sheep by how strongly they respond to a dog’s threatening pressure. Some very responsive sheep might panic under too much pressure, while others might ignore mild pressure and require stronger positioning by the dog.
The researchers observed that successful control often followed a two-step pattern. First, the dog subtly influenced the sheep’s orientation while the animals were mostly standing still. Once the flock was aligned in the desired direction, the dog increased pressure to trigger movement. The timing of those actions was critical, because alignment within a small group could disappear quickly as individuals switched between instincts.
“In our simulations, increasing pressure makes the flock reach the desired orientation faster, but how long the flock stays aligned is set mainly by noise,” Chakrabortty said. “In essence, dogs can steer the direction, but they can’t hold that decision indefinitely, so timing matters.”
Developing Computer Models
To understand the broader implications of that behavior, the team developed computer models that captured how sheep respond both to the dog and to one another. The models allowed the researchers to test different strategies for guiding groups whose members make independent decisions under uncertainty.
They then applied those ideas to simulations of robotic swarms. Engineers often design such systems so that each robot blends signals from all nearby robots before deciding how to move. While that approach works well when signals are clear, it can break down when information is noisy or conflicting, Bhamla explained.
To explain why that switching strategy can work under noisy conditions, the researchers used an analogy of a smoke-filled room where only one person can see the exit, and no one knows who that person is. If everyone polls everyone else and averages the guesses, the one correct signal can get diluted by many noisy ones.
“That’s the counterintuitive part. When only one person has the right information, averaging can wash out the signal. But if you follow one person at a time, and keep switching who that is, the right information can spread through the crowd,” Bhamla said.
Building on that idea, the researchers tested a strategy inspired by the switching behavior they observed in sheep. In the simulations, each robot paid attention to just one source at a time (either a guiding signal or a neighboring robot) and switched that source from one step to the next.
Under noisy conditions, this switching strategy required less effort to keep the group moving along a desired path than either averaging-based strategies or fixed leader-follower strategies.
The researchers call their approach the Indecisive Swarm Algorithm. The name reflects a counterintuitive insight: allowing influence to shift among individuals over time can make groups easier to guide when conditions are uncertain.
“Our findings suggest that the same dynamics that make small animal groups unpredictable may also offer new ways to control complex engineered systems,” Bhamla said.
CITATION: Tuhin Chakrabortty and Saad Bhamla, “Controlling noisy herds: Temporal network restructuring improves control of indecisive collectives,” Science Advances, 2026
This research was funded in part by Schmidt Sciences as part of a Schmidt Polymath grant to Saad Bhamla.
News Contact
Brad Dixon, braddixon@gatech.edu

A new robot could solve one of the biggest challenges facing indoor farmers: manual pollination.
Indoor farms, also known as vertical farms, are popular among agricultural researchers and are expanding across the agricultural industry. Some benefits they have over outdoor farms include:
- Year-round production of food crops
- Less water and land requirements
- Not needing pesticides
- Reducing carbon emissions from shipping
- Reducing food waste
Additionally, some studies indicate that indoor farms produce more nutritious food for urban communities.
However, these farms are often inaccessible to birds, bees, and other natural pollinators, leaving the pollination process to humans. The tedious process must be completed by hand for each flower to ensure the indoor crop flourishes.
Ai-Ping Hu, a principal research engineer at the Georgia Tech Research Institute (GTRI), has spent years exploring methods to efficiently pollinate flowering plants and food crops in indoor farms to find a way to efficiently pollinate flower plants and food crops in indoor farms.
Hu, Assistant Professor Shreyas Kousik of the George W. Woodruff School of Mechanical Engineering, and a rotating group of student interns have developed a robot prototype that may be up to the task.
The robot can efficiently pollinate plants that have both male and female reproductive parts. These plants only require pollen to be transferred from one part to the other rather than externally from another flower.
Natural pollinators perform this task outdoors, but Hu said indoor farmers often use a paintbrush or electric tootbrush to ensure these flowers are pollinated.
Knowing the Pose
An early challenge the research team addressed was teaching the robot to identify the “pose” of each flower. Pose refers to a flower’s orientation, shape, and symmetry. Knowing these details ensures precise delivery of the pollen to maximize reproductive success.
“It’s crucial to know exactly which way the flowers are facing,” Hu said.
“You want to approach the flower from the front because that’s where all the biological structures are. Knowing the pose tells you where the stem is. Our device grasps the stem and shakes it to dislodge the pollen.
“Every flower is going to have its own pose, and you need to know what that is within at least 10 degrees.”
Computer Vision Breakthrough
Harsh Muriki is a robotics master’s student at Georgia Tech’s School of Interactive Computing, who used computer vision to solve the pose problem while interning for Hu and GTRI.
Muriki attached a camera to a FarmBot to capture images of strawberry plants from dozens of angles in a small garden in front of Georgia Tech’s Food Processing Technology Building. The FarmBot is an XYZ-axis robot that waters and sprays pesticides on outdoor gardens, though it is not capable of pollination.
“We reconstruct the images of the flower into a 3D model and use a technique that converts the 3D model into multiple 2D images with depth information,” Muriki said. “This enables us to send them to object detectors.”
Muriki said he used a real-time object detection system called YOLO (You Only Look Once) to classify objects. YOLO is known for identifying and classifying objects in a single pass.
Ved Sengupta, a computer engineering major who interned with Muriki, fine-tuned the algorithms that converted 3D images into 2D.
“This was a crucial part of making robot pollination possible,” Sengupta said. “There is a big gap between 3D and 2D image processing.
“There’s not a lot of data on the internet for 3D object detection, but there’s a ton for 2D. We were able to get great results from the converted images, and I think any sector of technology can take advantage of that.”
Sengupta, Muriki, and Hu co-authored a paper about their work that was accepted to the 2025 International Conference on Robotics and Automation (ICRA) in Atlanta.
Measuring Success
The pollination robot, built in Kousik’s Safe Robotics Lab, is now in the prototype phase.
Hu said the robot can do more than pollinate. It can also analyze each flower to determine how well it was pollinated and whether the chances for reproduction are high.
“It has an additional capability of microscopic inspection,” Hu said. “It’s the first device we know of that provides visual feedback on how well a flower was pollinated.”
For more information about the robot, visit the Safe Robotics Lab project page.
News Contact
Nathan Deen
College of Computing
Georgia Tech

Members of the LIDAR Lab involved with the research with the DIGIT robot used in the trainings.
Viral videos abound with humanoid robots performing amazing feats of acrobatics and dance but finding videos of a humanoid robot performing a common household task or traversing a new multi-terrain environment easily, and without human control, are much rarer. This is because training humanoid robots to perform these seemingly simple functions involves the need for simulation training data that lack the complex dynamics and degrees of freedom of motion that are inherent in humanoid robots.
To achieve better training outcomes with faster deployment results, Fukang Liu and Feiyang Wu, graduate students under Professor Ye Zhao from the Woodruff School of Mechanical Engineering and faculty member of the Institute for Robotics and Intelligent Machines, have published a duo of papers in IEEE Robotics and Automation Letters. This is a collaborative work with three other IRIM affiliated faculties, Profs. Danfei Xu, Yue Chen, and Sehoon Ha, as well as Prof. Anqi Wu from School of Computational Science and Engineering.
To develop more reliable motion learning for humanoid robots and enable humanoid robots to perform complex whole-body movements in the real world, Fukang led a team and developed Opt2Skill, a hybrid robot learning framework that combines model-based trajectory optimization with reinforcement learning. Their framework integrates dynamics and contacts into the trajectory planning process and generates high-quality, dynamically feasible datasets, which result in more reliable motion learning for humanoid robots and improved position tracking and task success rates. This approach shows a promising way to augment the performance and generalization of humanoid RL policies using dynamically feasible motion datasets. Incorporating torque data also improved motion stability and force tracking in contact-rich scenarios, demonstrating that torque information plays a key role in learning physically consistent and contact-rich humanoid behaviors.
While other datasets, such as inverse kinematics or human demonstrations, are valuable, they don’t always capture the dynamics needed for reliable whole-body humanoid control.” said by Fukang Liu. “With our Opt2Skill framework, we combine trajectory optimization with reinforcement learning to generate and leverage high-quality, dynamically feasible motion data. This integrated approach gives robots a richer and more physically grounded training process, enabling them to learn these complex tasks more reliably and safely for real-world deployment. - Fukang Liu
In another line of humanoid research, Feiyang established a one-stage training framework that allows humanoid robots to learn locomotion more efficiently and with greater environmental adaptability. Their framework, Learn-to-Teach (L2T), unlike traditional two-stage “teacher-student” approaches, which first train an expert in simulation and then retrain a limited-perception student, teaches both simultaneously, sharing knowledge and experiences in real time. The result of this two-way training is a 50% reduction in training data and time, while maintaining or surpassing state-of-the-art performance in humanoid locomotion. The lightweight policy learned through this process enables the lab’s humanoid robot to traverse more than a dozen real-world terrains—grass, gravel, sand, stairs, and slopes—without retraining or depth sensors.
By training an expert and a deployable controller together, we can turn rich simulation feedback into a lightweight policy that runs on real hardware, letting our humanoid adapt to uneven, unstructured terrain with far less data and hand-tuning than traditional methods. - Feiyang Wu
By the application of these training processes, the team hopes to speed the development of deployable humanoid robots for home use, manufacturing, defense, and search and rescue assistance in dangerous environments. These methods also support advances in embodied intelligence, enabling robots to learn richer, more context-aware behaviors.Additionally, the training data process can be applied to research to improve the functionality and adaptability of human assistive devices for medical and therapeutic uses.
As humanoid robots move from controlled labs into messy, unpredictable real-world environments, the key is developing embodied intelligence—the ability for robots to sense, adapt, and act through their physical bodies,” said Professor Ye Zhao. “The innovations from our students push us closer to robots that can learn robust skills, navigate diverse terrains, and ultimately operate safely and reliably alongside people. - Prof. Ye Zhao
Author - Christa M. Ernst
Citations
Liu F, Gu Z, Cai Y, Zhou Z, Jung H, Jang J, Zhao S, Ha S, Chen Y, Xu D, Zhao Y. Opt2skill: Imitating dynamically-feasible whole-body trajectories for versatile humanoid loco-manipulation. IEEE Robotics and Automation Letters. 2025 Oct 13.
Wu F, Nal X, Jang J, Zhu W, Gu Z, Wu A, Zhao Y. Learn to teach: Sample-efficient privileged learning for humanoid locomotion over real-world uneven terrain. IEEE Robotics and Automation Letters. 2025 Jul 23.
News Contact
A new deep learning architectural framework could boost the development and deployment efficiency of autonomous vehicles and humanoid robots. The framework will lower training costs and reduce the amount of real-world data needed for training.
World foundation models (WFMs) enable physical AI systems to learn and operate within synthetic worlds created by generative artificial intelligence (genAI). For example, these models use predictive capabilities to generate up to 30 seconds of video that accurately reflects the real world.
The new framework, developed by a Georgia Tech researcher, enhances the processing speed of the neural networks that simulate these real-world environments from text, images, or video inputs.
The neural networks that make up the architectures of large language models like ChatGPT and visual models like Sora process contextual information using the “attention mechanism.”
Attention refers to a model’s ability to focus on the most relevant parts of input.
The Neighborhood Attention Extension (NATTEN) allows models that require GPUs or high-performance computing systems to process information and generate outputs more efficiently.
Processing speeds can increase by up to 2.6 times, said Ali Hassani, a Ph.D. student in the School of Interactive Computing and the creator of NATTEN. Hassani is advised by Associate Professor Humphrey Shi.
Hassani is also a research scientist at Nvidia, where he introduced NATTEN to Cosmos — a family of WFMs the company uses to train robots, autonomous vehicles, and other physical AI applications.
“You can map just about anything from a prompt or an image or any combination of frames from an existing video to predict future videos,” Hassani said. “Instead of generating words with an LLM, you’re generating a world.
“Unlike LLMs that generate a single token at a time, these models are compute-heavy. They generate many images — often hundreds of frames at a time — so the models put a lot of work on the GPU. NATTEN lets us decrease some of that work and proportionately accelerate the model.”

Kinsey Herrin, principal research scientist in the George W. Woodruff School of Mechanical Engineering, leads exoskeleton and prosthetic studies and fosters meaningful connections with the participant community.
Case Neel, 13, is a busy kid who loves coding and robotics, captains his school’s quiz bowl team, and lives with his family on a farm northwest of Atlanta.
He also has cerebral palsy — and for the past four years, he has played a key role in improving one of the most exciting medical devices at Georgia Tech.
“My role here is as a participant in exoskeleton research studies,” Case explained. “When I come in, researchers hook me up to sensors that monitor my gait when I’m walking in the device, and then they get a whole lot of data based off that.”

Georgia Tech's AI-fueled exoskeleton adapts to every step, helping patients relearn to walk with less effort and more confidence.Traditional robotic exoskeleton models require extensive manual calibration, but Aaron Young, associate professor in the George W. Woodruff School of Mechanical Engineering, and his team developed AI-driven software that automatically adapts to each user’s gait. By using a neural network, the system continuously monitors and adjusts support with each step, gradually syncing with the wearer’s unique movement. In this study, the team used a hip exoskeleton that delivers torque at the hip joint to help stroke survivors walk more easily.
Crossing a room shouldn’t feel like a marathon. But for many stroke survivors, even the smallest number of steps carries enormous weight. Each movement becomes a reminder of lost coordination, muscle weakness, and physical vulnerability.
A team of Georgia Tech researchers wanted to ease that struggle, and robotic exoskeletons offered a promising path. Their findings point to a simple but powerful shift: exoskeletons that adapt to people, rather than forcing people to adapt to the machine. Using artificial intelligence (AI) to learn the rhythm of patients’ strides in real time, the team showed how these devices can reduce strain and increase efficiency. They also demonstrated how the technology can help restore confidence for stroke survivors.
The Robot Finds the Rhythm
A robotic exoskeleton is a wearable device that helps people move with mechanical support. Traditional exoskeletons require endless manual adjustments — turning knobs, calibrating settings, and tweaking controls.
“It can be frustrating, even nearly impossible, to get it right for each person,” said Aaron Young, associate professor in the George W. Woodruff School of Mechanical Engineering. “With AI, the exoskeleton figures out the mapping itself. It learns the timing of someone’s gait through a neural network, without an engineer needing to hand-tune everything.”
The software monitors each step, instantly updates, and fine-tunes the support it provides. Over time, the exoskeleton aligns its movements with the unique gait of the person wearing it. In this study, the research team used a hip exoskeleton, which provides torque at the hip joint — in other words, adding power to help stroke survivors walk or move their legs more easily.
Taking Smarter Steps
Walking after a stroke can be tough and unpredictable. A patient’s stride can change from one day to the next, and even from one step to the next. Most exoskeletons aren’t built for that kind of variation. They are designed around the steady, even gait of healthy young adults, which can leave stroke survivors feeling more unsteady than supported.
Young’s breakthrough, detailed in IEEE Transactions on Robotics, is a neural network — a type of AI that learns patterns much like the human brain does. Sensors at the hip pick up how someone is moving, and the network translates those signals into just the right boost of power to support each step. It quickly figures out a person’s unique walking pattern. But lead clinician Kinsey Herrin said the AI’s learning doesn’t stop there. It keeps adjusting as the patient walks, so the exoskeleton can stay in sync even during stride shifts.
“The speed really surprised us,” Young said. “In just one to two minutes of walking, the system had already learned a person’s gait pattern with high accuracy. That’s a big deal, to adapt that quickly and then keep adapting as they move.”
Tests showed the system was far more accurate than the standard exoskeleton. It reduced errors in tracking stroke patients’ walking patterns by 70%.
Young emphasized that this research is about more than metrics. “When you see someone able to walk farther without becoming exhausted, that’s when you realize this isn’t just about robotics — it’s about giving people back a measure of independence,” he said.
Adapting Anywhere
Every exoskeleton comes with its own set of sensors, so the data they collect can look completely different from one device to the next. A neural network trained on one machine often stumbles when it’s moved to another. To get around that, Young’s team designed software that works like a universal adapter plug — no matter what device it’s connected to, it converts the signals into a form the AI can use. After just 10 strides of calibration, the system cut error rates by more than 75%.
“The goal is that someone could strap on a device, and, within a minute, it feels like it was built just for them,” Young said.
A Step Toward the Future
While the study centered on stroke survivors, the implications are far broader. The same adaptive approach could support older adults coping with age-related muscle weakness, people with conditions like Parkinson’s or osteoarthritis, or even children with neurological disabilities.
Young and his team are now running clinical trials to measure how well the AI-powered exoskeleton supports people in a wide range of everyday activities.
“There’s no such thing as an ‘average’ user,” Young said. “The real challenge is designing technology that can adapt to the full spectrum of human mobility.”
If Georgia Tech’s exoskeleton can rise to that challenge, the promise goes well beyond the lab. It could mean a world where technology doesn’t just help people walk — it learns to walk with them.
Inseung Kang, who holds a B.S., M.S., and Ph.D. from Georgia Tech, is the paper’s lead author and now an assistant professor of mechanical engineering at Carnegie Mellon University. He explained that the real promise is in what comes next.
“We’ve developed a system that can adjust to a person’s walking style in just minutes. But the potential is even greater. Imagine an exoskeleton that keeps learning with you over your lifetime, adjusting as your body and mobility change. Think of it as a robot companion that understands how you walk and gives you the right assistance every step of the way.”
Aaron Young is affiliated with Georgia Tech’s Institute for Robotics and Intelligent Machines.
This research was primarily funded by a grant (DP2HD111709-01) from the National Institutes of Health New Innovator Award Program. Georgia Tech researchers have created the first lung-on-a-chip with a functioning immune system, allowing it to respond to infections much like a real human lung. The breakthrough, published in Nature Biomedical Engineering, provides a more accurate way to study diseases, test therapies, and reduce reliance on animal models. With potential applications in conditions from influenza to cancer, the technology opens the door to personalized medicine that predicts how individual patients will respond to treatment.
News Contact
Michelle Azriel Sr. Writer - Editor

Practice may not make perfect for robots, but new machine learning models from Georgia Tech are allowing them to improve their skillsets to more effectively assist humans in the real world.
Danfei Xu, an assistant professor in Georgia Tech’s School of Interactive Computing, is introducing new models that provide robots with “on-the-job” training.
The National Science Foundation (NSF) awarded Xu its CAREER award given to early career faculty. The award will enable Xu to expand his research and refine his models, which could accelerate the process of robot deployment and alleviate manufacturers from the burden of achieving perfection.
“The main problem we’re trying to tackle is how to allow robots to learn on the job,” Xu said. “How should it self-improve based on the performance or the new requirements or new user preferences in each home or working environment? You cannot expect a robot manufacturer to program all of that.
“The challenging thing about robotics is that the robot must get feedback from the physical environment. It must try to solve a problem to understand the limits of its abilities so it can decide how to improve its own performance.”
As with humans, Xu views practice as the most effective way for a robot to improve a skill. His models train the robot to identify the point at which it failed in its task performance.
“It identifies that skill and sets up an environment where it can practice,” he said. “If it needs to improve opening a drawer, it will navigate itself to the drawer and practice opening it.”
The models allow the robot to split tasks into smaller parts and evaluate its own skill level using reward functions. Cooking dinner, for example, can be divided into steps like turning on the stove and opening the fridge, which are necessary to achieve the overall goal.
“Planning is a complex problem because you must predict what’s going to happen in the physical world,” Xu said. “We use machine learning techniques that our group has developed over the past two years, using generated models to generate positive futures. They’re very good at modeling long-horizon phenomena.
“The robot knows when it’s failed because there’s a value that tells it how well it performed the task and whether it received its reward. While we don’t know how to tell the robot why it failed, we have ways for it to improve its skills based on that measurement.”
One of the biggest barriers that keeps many robots from being made available for public use is the pressure on manufacturers to make the robot as close to perfect as possible at deployment. Xu said it’s more practical to accept that robots will have learning gaps that need to be filled and to implement more efficient real-world learning models.
“We work under the pressure of getting everything correct before deployment,” he said. “We need to meet the basic safety requirements, but in terms of competence, it is difficult to get that perfect at deployment. This takes some of the pressure off because it will be able to self-adapt.”
Virtual Workspace for Data Workers
Yalong Yang, another assistant professor in the School of IC, also received the NSF CAREER Award for a research proposal that will design augmented and virtual reality (AR/VR) workspaces for data workers.
“In 10 years, I envision everyone will use AR/VR in their office, and it will replace their laptop or their monitor,” Yang said.
Yang said he is also working with Google on the project and using Google Gemini to bring conventional applications to immersive space, with data tools being the most complicated systems to re-design for immersive environments.
The immersive workspace and interface will also enable teams of data workers to collaborate and share their data in real-time.
“I want to support the end-to-end process,” Yang said. “We have visualization tools for data, but it’s not enough. Data science is a pipeline — from collecting data to processing, visualizing, modeling and then communicating. If you only support one, people will need to switch to other platforms for the other steps.”
Yang also noted that prior research has shown that VR can enhance cognitive abilities, such as memory and attention and support multitasking. The results of his project could lead to maximizing worker efficiency without them feeling strained.
“We all have a cognitive limit in our working memory. Using AR/VR can increase those limits and process more information. We can expand people’s spatial ability to help them build a better mental model of the data presented to them.”
Yang was also recently named a 2025 Google Research Scholar as he seeks to build a new artificial intelligence (AI) tool that converts mobile apps into 3D immersive environments.

Professor Jun Ueda with a student in his lab
Robotic systems are currently deployed in sectors ranging from industrial manufacturing to healthcare to agriculture, adding benefits in production times, patient outcomes, and yields. This trend towards greater automation and human robot collaborative work environments, while providing great opportunities, also highlights a critical gap in cybersecurity research. These systems rely on network communication to coordinate movement, meaning that security breaches could result in the robot acting in ways that may endanger people and property.
Current cybersecurity approaches have been shown to be insufficient in blocking sophisticated attacks aimed at networked robotic motion-control systems.
To address this gap, Jun Ueda, Professor and ASME Fellow in the George W. Woodruff School of Mechanical Engineering at Georgia Tech, has been awarded approximately $700,000 by the National Science Foundation to establish methods to enhance cybersecurity for networked motion-control system. The research will focus on the unique geometric vulnerabilities in networked robotic systems and stealthy false data injection attacks that exploit geometric coordinate transformations to maintain mathematical consistency in robotic dynamics while altering physical world behavior.
Using an interdisciplinary approach that will combine research methodology from system dynamics, control, communication, differential geometry and cybersecurity engineering, Ueda hopes to establish new mathematical tools for analyzing robotic security and develop safer networked robotic systems that successfully repel system intrusion, manipulation attacks, and attacks that mislead operators.
This article refers to NSF Program Foundational Research in Robotics (FRR) Award # 2112793
A Geometric Approach for Generalized Encrypted Control of Networked Dynamical Systems
News Contact

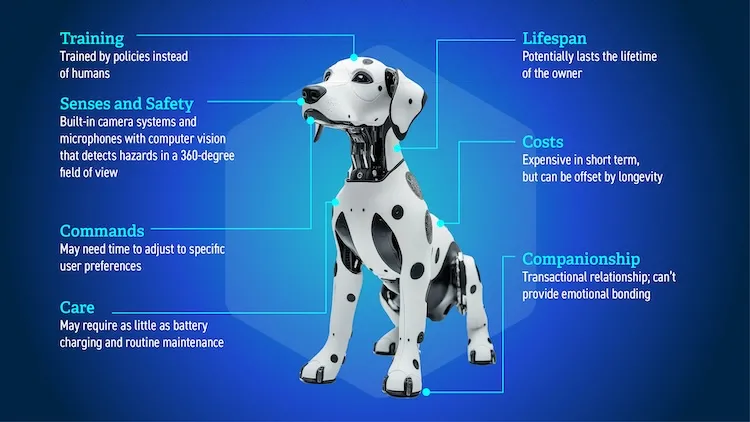
People who are visually impaired and cannot afford or care for service animals might have a practical alternative in a robotic guide dog being developed at Georgia Tech.
Before launching its prototype, a research team within Georgia Tech’s School of Interactive Computing, led by Professor Bruce Walker and Assistant Professor Sehoon Ha, is working to improve its methods and designs based on research within blind and visually impaired (BVI) communities.
“There’s been research on the technical aspects and functionality of robotic guide dogs, but not a lot of emphasis on the aesthetics or form factors,” said Avery Gong, a recent master’s graduate who worked in Walker’s lab. “We wanted to fill this gap.”
Training a guide dog can cost up to $50,000, and while there are nonprofit organizations that can cover these costs for potential owners, there is still a gap between the amount of available guide dogs and BVI individuals who need them. Not all BVI individuals are able to care for a dog and feed it. The dog also has fewer than 10 working years before it needs replacement.
Gong co-authored a paper on the design implications of the robotic guide dog that was presented at the 2025 International Conference on Robotics and Automation (ICRA) in Atlanta in May.
The consensus among the study’s participants indicates they prefer a robotic guide dog that:
- resembles a real dog and appears approachable
- has a clear identifier of being a guide dog, such as a vest
- has built-in GPS and Bluetooth connectivity
- has control options such as voice command
- has soft textures without feeling furry
- has long battery life and self-charging capability
“A lot of people said they didn’t want the dog to look too cute or appealing because it would draw too much attention,” said Aviv Cohav, another lead author of the paper and recent master’s graduate.
“Many people have issues with taking their guide dog to places, whether it’s little kids wanting to play with the dog or people not liking dogs or people being scared of them, and that reflects on the owners themselves. We wanted to look at what would be a good balance between having a functional robot that wouldn’t scare people away or be a distraction.”
The researchers also had to consider the perspectives of sighted individuals and how society at large might view a robotic guide dog.
An example of this is the amount of noise the dog makes while walking. The owner needs to hear the dog is active, but the clanky sound many off-the-shelf robots make could create disturbances in indoor spaces that amplify sounds. To offset the noise, the team developed algorithms that allow the robot to move more quietly.
Walker and his lab have examined similar scenarios that must take public perception into account.
“We like to think of Georgia Tech as going the extra mile,” Walker said. “Let’s not just make a robot, but a robot that’s going to fit into society.
“To have impact, the technologies we produce must be produced with society in mind. This is a holistic design that considers the users and all the people with whom the users interact.”
Taery Kim, a computer science Ph.D. student, began working on the concept of a robotic guide dog when she came to Georgia Tech in 2022. She and Ha, her advisor, have authored papers on building the robot’s navigation and safety components.
“When I started, I thought it would be as simple as giving the guide dog a command to take me to Starbucks or the grocery store, and it would just take me,” Kim said. “But the user must give waypoint directions — ‘go left here,’ ‘turn right,’ ‘go forward,’ ‘stop.’ Detailed commands must be delivered to the dog.”
While a real dog has naturally enhanced senses of hearing and smell that can’t be replicated, technology can provide interconnected safety features during an emergency. The researchers envision a camera system equipped with a 360-degree field of view, computer vision algorithms that detect obstacles or hazards, and voice recognition that recognizes calls for help. An SOS function could automatically call 911 at the owner’s request or if the owner is unresponsive.
Kim said the robot should also have explainability features to enhance communication with the owner. For example, if the robot suddenly stops or ignores an owner’s commands, it should tell the owner that it’s detecting a hazard in their path.
Manufacturing a robot at scale would initially be expensive, but the researchers believe the cost would eventually be offset because of its longevity. BVI individuals may only need to purchase one during their lifetime.
To introduce a prototype, the multidisciplinary research team recognizes that it needs to enlist experts from other fields to adequately address the various implications and research gaps inherent in the project.
Walker said the teams welcome additional partners who are keen to tackle challenges ranging from design and engineering to battery life to human-robot interaction.
Team member J. Taery Kim was supported by the National Science Foundation's Graduate Research Fellowship Program (NSF GRFP) under Grant No. DGE-2039655.
News Contact
Nathan Deen, Communications Officer
School of Interactive Computing
nathan.deen@cc.gatech.edu

A new study explains how tiny water bugs use fan-like propellers to zip across streams at speeds up to 120 body lengths per second. The researchers then created a similar fan structure and used it to propel and maneuver an insect-sized robot.
The discovery offers new possibilities for designing small machines that could operate during floods or other challenging situations.
Instead of relying on their muscles, the insects about the size of a grain of rice use the water’s surface tension and elastic forces to morph the ribbon-shaped fans on the end of their legs to slice the water surface and change directions.
Once they understood the mechanism, the team built a self-deployable, one-milligram fan and installed it into an insect-sized robot capable of accelerating, braking, and maneuvering right and left.
The study is featured on the cover of the journal Science.
Read the entire story and see the robot in action on the College of Engineering website.
News Contact
Jason Maderer
College of Engineering
maderer@gatech.edu